
Cobot and Inline Setup
Fixing the Aesthetix
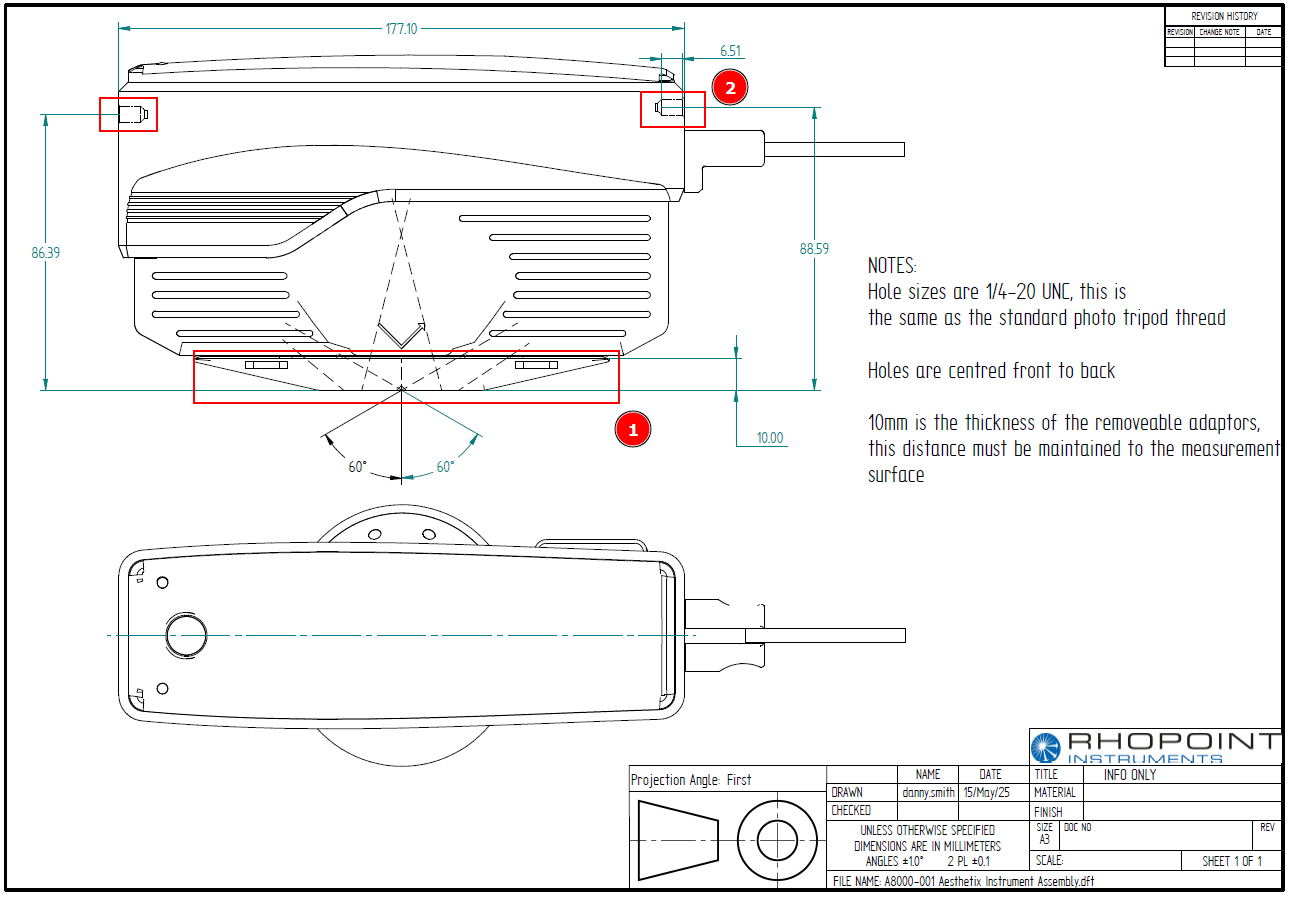
The Aesthetix aluminium chassis should be fixed at two points (2)
Rhopoint supply fixtures and brackets that can be used to integrate to Cobot/Robot or inline mounting points - contact us for more details.
Positioning the device- contact measurement
Before taking a measurement the device must be positioned so that the base of the adaptor is in contact with the surface and completely flat.
Procedure for non-contact measurement
If measuring the gloss of curved parts the non-contact small area gloss adaptor should be attached.
-For all other measurments the bottom adaptor (1) should be removed.
-Position the sensor sensor so the bottom part of the Aesthetix (without base) is 10mm from the surface.
-Use the interactive measurement mode to check the correct part of the sample is in positioned in the FOV, and that the gloss reflection is in the middle of the sensor. How to measure Surface Brilliance
Considerations for Non-contact measurement
Ambient lighting- measurments are largely unaffected by changes in ambient light conditions, however do not use outside or in direct sunlight without shielding optics from gross changes in light conditions.
Positional Accuracy- For accurate measurement the focal distance must be maintained to 10mm +/- 0.2mm (measured from the bottom of the sensor unit) with a maximum angular error of +/- 0.5° parallel and perpendiular to the measurement plane
Moving Material- Gloss, Haze, DOI measurements can be measured on a moving line, other measurements which require observer camera images require a stationary material.